
为鼓励更多汽车界高水平学术科技作品的涌现,激发汽车及汽车相关专业的大学生的创新活力,促进全球汽车学术交流和人才培育成长,第三十一届中国汽车工程学会年会(SAECCE 2024)在中国重庆·科学会堂召开,中国汽车工程学会面向国内外主要高校开展了大学生学术科技作品征集评选工作,经过近百支队伍的激烈角逐,最终9支作品进入决赛。其中,来自3003必赢贵宾会线路的两支队伍凭借出色的创意与技术方案成功晋级终评,这两支队伍分别为由孙博华、孙天骏老师指导,罗彤、刘桓嘉、王卓凡、李文锦、张睿同学撰写的《面向人机共驾决策的实时驾驶行为生成模型》与雷雨龙、付尧老师指导,战椿水、王炳策、赵鸿志、孙小雯、罗嘉良同学撰写的《考虑通信延时的轨迹跟踪控制方法研究》在中国汽车工程学会大学生学术创意作品征集评选活动中获评优秀创意作品。

罗彤同学(右一)与战椿水同学(右三)代表团队领奖
《面向人机共驾决策的实时驾驶行为生成模型》:该作品在提出驾驶行为具有相对性和连续性基础上,首先提出基于LSTM长短期记忆网络的驾驶意图生成模型,基于BP神经网络的驾驶行为决策模型,以及基于PID模糊算法的驾驶行为控制模型。最后,通过实验比较分析可知,该模型能够满足自动驾驶算法验证开发以及人机共享系统对于虚拟驾驶人模型客观、准确、实时生成驾驶行为的需求。
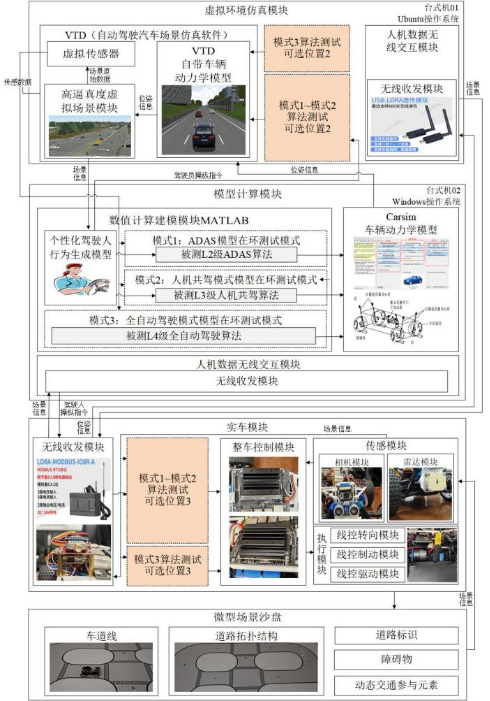
自动驾驶算法验证开发平台框架图
《考虑通信延时的轨迹跟踪控制方法研究》:该作品以电动汽车为研究对象,提出了一种考虑通信延时的非线性轨迹跟踪控制器,以提高汽车轨迹跟踪性能。首先,建立二自由度车辆模型,利用“魔术公式”建立轮胎模型,建立具有通信延时的非线性轨迹跟踪模型;其次,根据控制器输出约束,利用反步调节函数,设计了非线性鲁棒控制器,满足系统性能指标和鲁棒性要求;最后,分别在正弦工况与双移线工况下,通过MATLAB/Simulink进行仿真验证轨迹跟踪性能。结果表明:本文提出的控制器的轨迹跟踪在正弦工况下横向误差的均方根值较PID方法及MPC方法分别降低0.0101和0.0619,双移线工况下分别降低0.1158和0.0533;当引入干扰时,本文控制器鲁棒性优于PID及MPC。
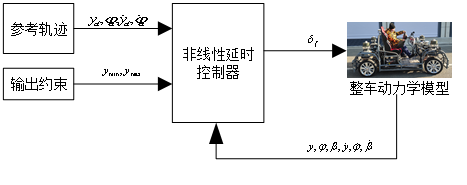
控制器框架图
3003必赢贵宾会线路将继续秉承开放合作、创新驱动的发展理念,不断培养具有国际视野和创新能力的高素质人才,推动汽车产业的科技进步,为我国汽车行业输送更多全面发展的新时代工科人才!

